本文含有一定的AI润色
想要直接在Pi上编译v3dv也不是不行,target并不是很多,大约500多个c target,一会也就编完了。
直接编译的话可以参考 Maíra Canal | Cross-Compiling CTS for the Raspberry Pi 4
虽然Maíra Canal这篇博客的重点是交叉编译CTS(我的下一个难题...)
Mesa的交叉编译准备
Build Machine: Ubuntu 2404 LTS (WSL2 x86_64)
Target Machine: Raspberry Pi OS (Debian 13 Trexie aarch64)
准备交叉编译环境
首先,在 WSL2 Ubuntu 中启用 arm64 架构并安装交叉编译器及依赖库。
# 启用 arm64 架构支持
sudo dpkg --add-architecture arm64
sudo apt update
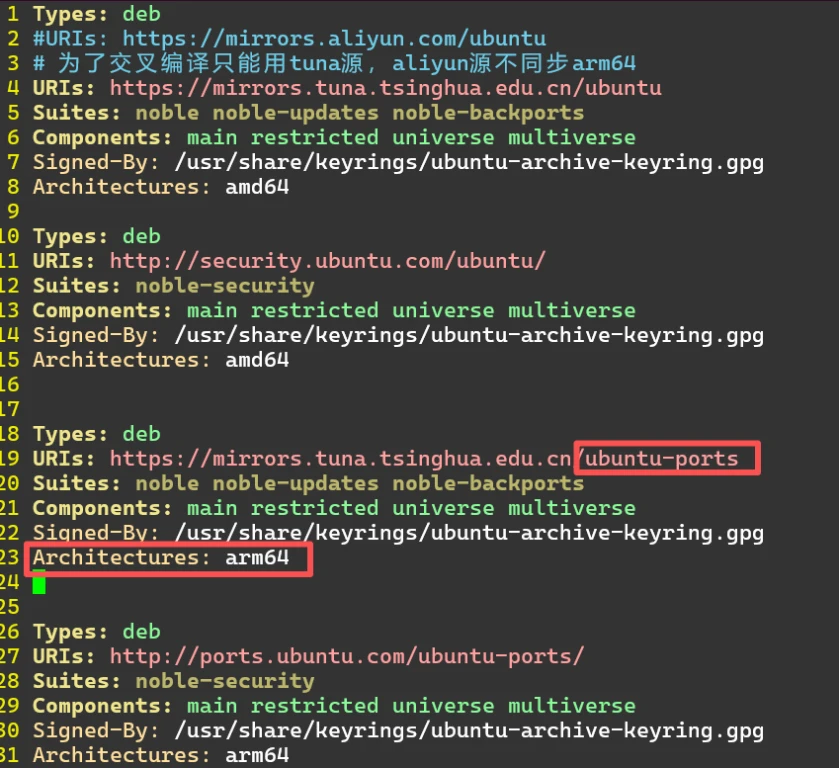
注意 apt sourcelist的配置,ubuntu的其他架构的二进制不在默认的ubuntu源里,而是在ubuntu-ports源里,所以要在source list里指明不同架构的apt包去哪里找
# 安装交叉工具链和基础构建工具
sudo apt install crossbuild-essential-arm64 \
python3-mako python3-yaml bison flex meson ninja-build libx11-xcb-dev libxcb-glx0-dev libxcb-randr0-dev libxcb-dri3-dev libdrm-dev libxcb-dri2-0-dev libxcb-dri3-dev libx11-dev libxext-dev libxdamage-dev libxshmfence-dev libxxf86vm-dev
# 安装针对 arm64 的目标依赖库
sudo apt install \
libdrm-dev:arm64 \
libx11-dev:arm64 \
libwayland-dev:arm64 \
libxshmfence-dev:arm64 \
libexpat1-dev:arm64 \
zlib1g-dev:arm64 \
libxcb-dri3-dev:arm64 \
libxcb-present-dev:arm64 \
libxext-dev:arm64 \
libxfixes-dev:arm64 \
libxdamage-dev:arm64 \
libxcb-randr0-dev:arm64 \
libxcb-glx0-dev:arm64 \
libx11-xcb-dev:arm64 \
libxshmfence-dev:arm64 \
libxcb-shm0-dev:arm64 \
libxcb-dri3-dev:arm64 \
libxrandr-dev:arm64 \
下载arm64版的vulkan sdk
Releases · jakoch/vulkan-sdk-arm
lunarg上只有windows arm的,linux arm的没有。v3dv编译的时候会读取一些vulkan sdk的库(具体而言,libSPIR-*.a的若干库文件)
找了半天github上有人预编译的有,解压出来放到vulkan sdk的地方
去除vulkan-sdk的pkg-config
linux正常安装的vulkan-sdk一般会让加载setup-env.sh
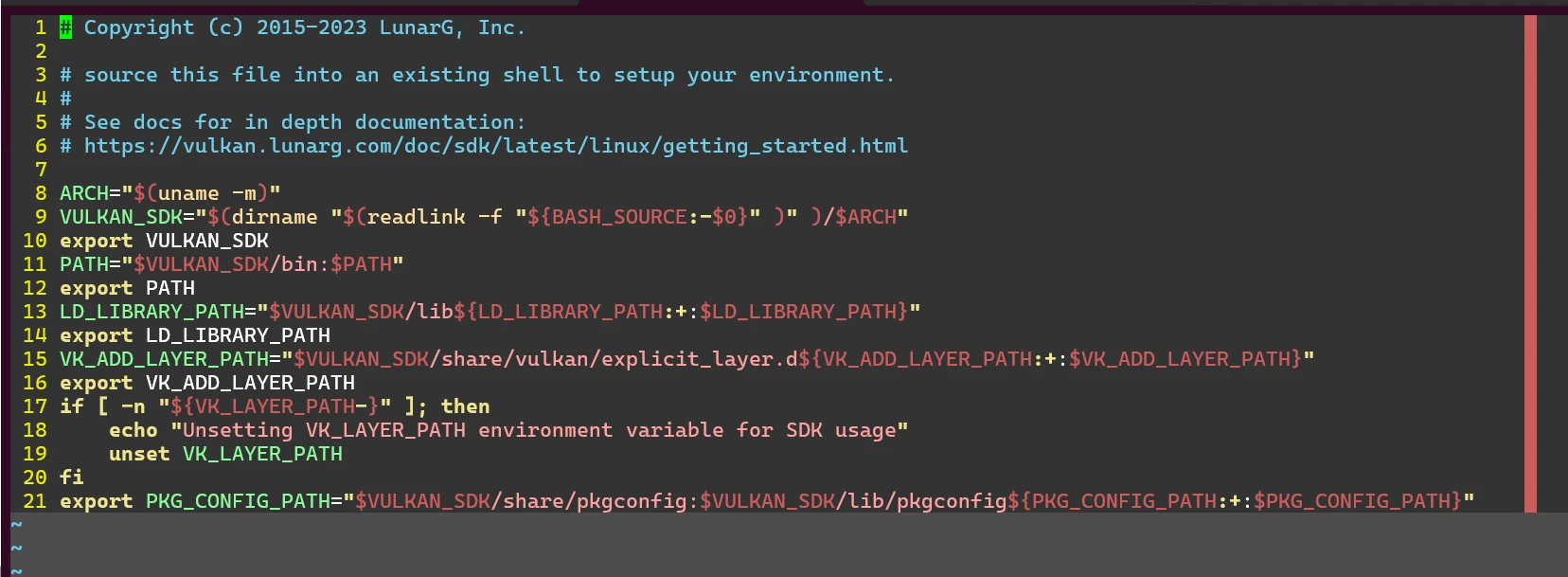
注意最后一行添加了PKG_CONFIG_PATH,这会导致交叉编译的时候pkg-config 错误搜索到x86-64的lib
运行export PKG_CONFIG_PATH=""把这个注释掉
创建 Meson 交叉编译配置文件
在 Mesa 源码根目录下创建一个名为 cross_file_aarch64.txt 的文件,填入以下内容:
注意修改vulkan sdk的目录到你自己电脑的目录。
[binaries]
c = 'aarch64-linux-gnu-gcc'
cpp = 'aarch64-linux-gnu-g++'
ar = 'aarch64-linux-gnu-gcc-ar'
strip = 'aarch64-linux-gnu-strip'
pkg-config = '/usr/bin/pkg-config'
[properties]
pkg_config_libdir = ['/home/panda/vulkansdk/1.4.328.1/aarch64/share/pkgconfig','/usr/lib/aarch64-linux-gnu/pkgconfig', '/usr/share/pkgconfig']
[host_machine]
system = 'linux'
cpu_family = 'aarch64'
cpu = 'aarch64'
endian = 'little'
配置 Meson 编译选项
执行以下命令进行配置。这里我们重点开启 broadcom Vulkan 驱动。
meson可能会报一堆依赖问题(ubuntu 2404的apt里带的meson太老了,这里最好用python的环境管理工具pyenv/conda/uv等工具重新创建一个新的纯洁python环境然后pip来把meson/mako/pyyaml等库装好)
pip3 install mako pyyaml
meson setup build-rpi5 \
--cross-file cross_file_aarch64.txt \
-Dprefix=~/rpi5_v3dv \
-Dlibdir=lib/aarch64-linux-gnu \
-Dbuildtype=release \
-Dplatforms=x11,wayland \
-Dvulkan-drivers=broadcom \
-Dgallium-drivers=
这里我注释掉了gallium-drivers,因为我不需要gl驱动。
开始编译
使用 Ninja 进行编译:
ninja -C build-rpi5
ninja install # 把编译产物拷贝到~/rpi5_v3dv
提取编译产物
编译完成后,可以在以下位置找到关键文件:
- Vulkan 驱动:
build-rpi5/src/broadcom/vulkan/libvulkan_broadcom.so - JSON 配置文件:
build-rpi5/src/broadcom/vulkan/broadcom_icd.aarch64.json
可以通过rysnc或者sshfs挂载等方式传输到树莓派
在树莓派上检验编译产物
vulkaninfo | grep "driverVersion"
# driverVersion = 25.0.7 (104857607) raspberry pi os自带的版本, debian 13
export VK_ICD_FILENAMES=/home/panda/rpi5_v3dv/share/vulkan/icd.d/broadcom_icd.aarch64.json
vulkaninfo | grep "driverVersion"
# driverVersion = 25.3.4 (104869892) 自编译的版本
可以通过vkMark来跑分,
mesa 25.0.7 v3dv gpu 大概490分
mesa 25.0.7 llvmpipeline cpu 大概250分
mesa 25.3.4(自编译) v3dv gpu 大概503分